")
Constrained Predictive Control of Three-Phase Buck Rectifiers
dc_ini
Contents
close all; clear all; CSVM_pattern warning off;
Formulate DC State-Space model_dc
A_dc = [[0 -1/L_dc];
[1/C_dc -1/(C_dc*R_dc)]];
B_dc = [1.5/L_dc; 0];
C_dc_ = [0 1];
D_dc = 0;
% %% dimension declaration
% [m1, n1] = size(C_dc_);
% [n1, n_in] = size(B_dc);
%
% %% augmented model creation
% A_e = eye(n1+m1, n1+m1);
% A_e(1:n1, 1:n1) = A_dc;
% A_e(n1+1:n1+m1, 1:n1) = C_dc_ * A_dc;
%
% B_e = zeros(n1+m1, n_in);
% B_e(1:n1, :) = B_dc;
% B_e(n1+1:n1+m1, :) = C_dc_ * B_dc;
%
% C_e = zeros(m1,n1+m1);
% C_e(:, n1+1:n1+m1) = eye(m1,m1);
%
%
% Buck_C = ss(A_e,B_e,C_e,D_dc);
Buck_C = ss(A_dc,B_dc,C_dc_,D_dc);
Buck_D = c2d(Buck_C, t_sample,'zoh');
model_dc = LTISystem(Buck_D);
U_dc_ref = 400; xref = [U_dc_ref/R_dc U_dc_ref]'; model_dc.x.with('reference'); model_dc.x.reference = xref; % yref = 400; % model_dc.y.with('reference'); % model_dc.y.reference = yref; %model_dc.with('integrator');
Give DC constraints
% hard constraints % set constraint % xconst = 500; % P = Polyhedron('lb', [-0; -0], 'ub', [500; 500]); % model_dc.x.with('initialSet'); % model_dc.x.initialSet = P; model_dc.x.max = [50; 500]; % constraint formulation model_dc.x.min = [0; 0]; % model_dc_ac.y.max = [500]; % model_dc_ac.y.min = [0]; model_dc.u.max = [600]; model_dc.u.min = [0]; % model_dc.u.with('deltaMin'); % model_dc.u.with('deltaMax'); % model_dc.u.deltaMax = 750; % model_dc.u.deltaMin = -750; % model_dc.y.with('softMax'); % model_dc.y.with('softMin'); % model_dc.x.with('softMax'); % model_dc.x.with('softMin'); % model_dc.u.with('softMax'); % model_dc.u.with('softMin'); % soft constraints model_dc.u.penalty = OneNormFunction( 1e-6 ); model_dc.x.penalty = OneNormFunction( diag([1, 1])); % model_dc.u.with('deltaPenalty'); % model_dc.u.deltaPenalty = QuadFunction( 1e-8 ); %model_dc.x.penalty = QuadFunction(diag([1000, 1000])); % model_dc.y.penalty = OneNormFunction( 1 ); U0_result_matrix = []; Trees = []; maxiter = 2; for i=1:maxiter
Set DC horison and formulate contrl rules
N_dc = i;
mpc = MPCController(model_dc, N_dc);
expmpc_dc = mpc.toExplicit();
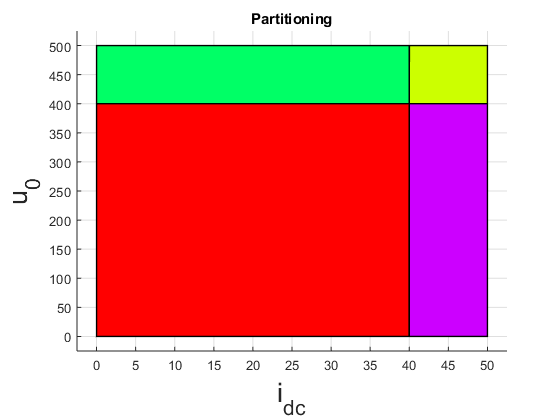
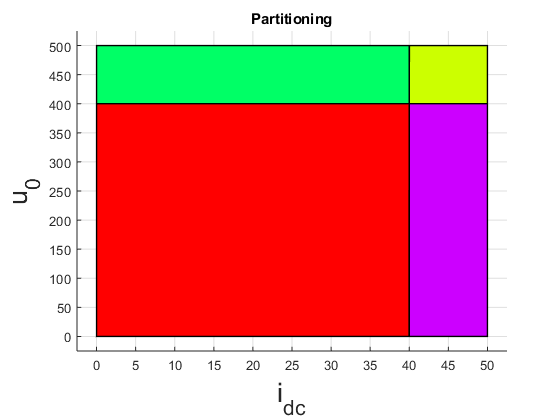
if (i == maxiter)
figure
expmpc_dc.partition.plot();
title('Partitioning')
xlabel('i_{dc}','FontSize',20)
ylabel('u_{0}','FontSize',20)
end
mpt_plcp: 6 regions
mpt_plcp: 13 regions
Constructing binary tree
Tree = BinTreePolyUnion(expmpc_dc.optimizer);
%genvarname('tree', num2str(i)) = tree;
save(genvarname(['Tree', num2str(i)],'Tree'));
% %% Create fancy plots
%
% title(Partitioning)
% xlabel('x_1')
% ylabel('x_2')
% print -deps SimpleExplicit_Buck_Partition
%
% %% Simulate
%
% loop = ClosedLoop(expmpc_dc, model_dc);
%
% x0 = [0 0 ]';
% u0 = 400;
% Nsim = 40e3;
% %data = loop.simulate(x0, Nsim, 'x.reference', repmat(xref, 1, Nsim));
% %data = loop.simulate(x0, Nsim, 'u.previous', u0);
% data = loop.simulate(x0, Nsim);
% figure
% subplot(2, 1, 1);hold on
% plot(1:Nsim, data.X(1,1:Nsim),'g', 'linewidth', 2);
% plot(1:Nsim, data.X(2,1:Nsim),'k', 'linewidth', 2);
% %plot(1:Nsim, data.X(3,1:Nsim),'r', 'linewidth', 2);
% plot( 1:Nsim, xref(1)*ones(1,Nsim), 'k--', 1:Nsim, xref(2)*ones(1,Nsim), 'k--');
% plot( 1:Nsim, model_dc.x.max(1)*ones(1,Nsim), 'r--', 1:Nsim, model_dc.x.max(2)*ones(1,Nsim), 'r--');
% legend('X1','X2','X3');
%
% subplot(2, 1, 2);
% plot(1:Nsim, data.U(:,1:Nsim),'b', 'linewidth', 2);hold off
% legend('U');
%
% figure
% plot(1:Nsim, data.Y(:,1:Nsim),'b', 'linewidth', 2);
% legend('Y');
Found 7 unique hyperplanes (out of 23) Determining position of 6 regions w.r.t. unique hyperplanes... ...done in 0.1 seconds. Discarding 4 outer boundaries. Considering 3 candidates for separating hyperplanes. Constructing the tree... ...done in 0.0 seconds. Depth: 3, no. of nodes: 4
Found 12 unique hyperplanes (out of 50) Determining position of 13 regions w.r.t. unique hyperplanes... ...done in 0.2 seconds. Discarding 4 outer boundaries. Considering 8 candidates for separating hyperplanes. Constructing the tree... ...done in 0.1 seconds. Depth: 4, no. of nodes: 9
Export DC explicit controller to C
clear dir_name; clear file_name; dir_name = 'remade_new_converter_dc/new_converter_explicitMPC_dc'; file_name = 'EMPCcontroller_for_remade_new_converter_dc'; expmpc_dc.exportToC(file_name,dir_name); % Compile S-Function p = [pwd,filesep,dir_name,filesep]; mex(['-LargeArrayDims -I',dir_name],[p,file_name,'_sfunc.c'],[p,file_name,'.c']); % Set the source files in the Simulink scheme simple_explicit_buck; str = sprintf('"%s%s_sfunc.c" "%s%s.c"',p,file_name,p,file_name); set_param('simple_explicit_buck','CustomSource',str); set_param('simple_explicit_buck/DC_Controller','FunctionName',[file_name,'_sfunc']);
Output written to "D:\CloudVIRT\2018_ActaHung_EMPC_for_CSI\Matlab\EMPC_Implementation_no_figures\remade_new_converter_dc/new_converter_explicitMPC_dc\EMPCcontroller_for_remade_new_converter_dc.c". C-mex function written to "D:\CloudVIRT\2018_ActaHung_EMPC_for_CSI\Matlab\EMPC_Implementation_no_figures\remade_new_converter_dc/new_converter_explicitMPC_dc\EMPCcontroller_for_remade_new_converter_dc_mex.c". Building with 'MinGW64 Compiler (C)'. MEX completed successfully.
Output written to "D:\CloudVIRT\2018_ActaHung_EMPC_for_CSI\Matlab\EMPC_Implementation_no_figures\remade_new_converter_dc/new_converter_explicitMPC_dc\EMPCcontroller_for_remade_new_converter_dc.c". C-mex function written to "D:\CloudVIRT\2018_ActaHung_EMPC_for_CSI\Matlab\EMPC_Implementation_no_figures\remade_new_converter_dc/new_converter_explicitMPC_dc\EMPCcontroller_for_remade_new_converter_dc_mex.c". Building with 'MinGW64 Compiler (C)'. MEX completed successfully.
Simulate model
open_system('simple_explicit_buck'); sim('simple_explicit_buck');
Found algebraic loop containing:
<a href="matlab:open_and_hilite_hyperlink ('simple_explicit_buck/Subsystem/ModI_Lim','error')">simple_explicit_buck/Subsystem/ModI_Lim</a>
<a href="matlab:open_and_hilite_hyperlink ('simple_explicit_buck/Subsystem/SatDyn/LowerRelop1','error')">simple_explicit_buck/Subsystem/SatDyn/LowerRelop1</a> (discontinuity)
<a href="matlab:open_and_hilite_hyperlink ('simple_explicit_buck/Subsystem/SatDyn/Switch2','error')">simple_explicit_buck/Subsystem/SatDyn/Switch2</a> (algebraic variable) (discontinuity)
Found algebraic loop containing:
<a href="matlab:open_and_hilite_hyperlink ('simple_explicit_buck/Subsystem/ModI_Lim','error')">simple_explicit_buck/Subsystem/ModI_Lim</a>
<a href="matlab:open_and_hilite_hyperlink ('simple_explicit_buck/Subsystem/SatDyn/LowerRelop1','error')">simple_explicit_buck/Subsystem/SatDyn/LowerRelop1</a> (discontinuity)
<a href="matlab:open_and_hilite_hyperlink ('simple_explicit_buck/Subsystem/SatDyn/Switch2','error')">simple_explicit_buck/Subsystem/SatDyn/Switch2</a> (algebraic variable) (discontinuity)
Store results
U0_result_matrix = [u_0.Data U0_result_matrix];
clear mpc;
clear expmpc_dc;
clear Tree;
disp(i);
1
2
end
Save results to file
save('Resultmatrix.mat','U0_result_matrix') time = u_0.Time; save('Resultmatrix_time.mat','time'); clear time; save('Treesmatrix','Trees')
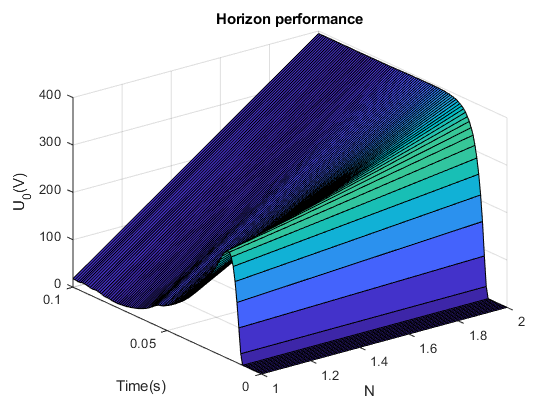
Plot all results
load('Resultmatrix'); D = U0_result_matrix; load('Resultmatrix_time'); t = time; res = 1000; res_U0_result_matrix = []; j = 1; i = size(D,2); res_D = []; for j=1:i res_D = [D(1:res:end,j) res_D]; end res_t = t(1:res:end); iteration = 1:1:i; if (size(iteration,2) > 1) figure surf(iteration,res_t,res_D) title('Horizon performance') xlabel('N') ylabel('Time(s)') zlabel('U_0(V)') end